
GrandSLAm: Guaranteeing SLAs for Jobs in
Microservices Execution Frameworks
Ram Srivatsa Kannan
University of Michigan, Ann Arbor
Lavanya Subramanian
∗
Facebook
Ashwin Raju
University of Texas at Arlington
Jeongseob Ahn
†
Ajou University
Jason Mars
University of Michigan, Ann Arbor
Lingjia Tang
University of Michigan, Ann Arbor
Abstract
The microservice architecture has dramatically reduced user
eort in adopting and maintaining servers by providing a
catalog of functions as services that can be used as building
blocks to construct applications. This has enabled datacenter
operators to look at managing datacenter hosting microser-
vices quite dierently from traditional infrastructures. Such
a paradigm shift calls for a need to rethink resource manage-
ment strategies employed in such execution environments.
We observe that the visibility enabled by a microservices ex-
ecution framework can be exploited to achieve high through-
put and resource utilization while still meeting Service Level
Agreements, especially in multi-tenant execution scenarios.
In this study, we present GrandSLAm, a microservice exe-
cution framework that improves utilization of datacenters
hosting microservices. GrandSLAm estimates time of comple-
tion of requests propagating through individual microservice
stages within an application. It then leverages this estimate
to drive a runtime system that dynamically batches and re-
orders requests at each microservice in a manner where indi-
vidual jobs meet their respective target latency while achiev-
ing high throughput. GrandSLAm signicantly increases
throughput by up to 3
×
compared to the our baseline, with-
out violating SLAs for a wide range of real-world AI and ML
applications.
CCS Concepts • Software and its engineering → Soft-
ware as a service orchestration system;
∗
This work was done while the author worked at Intel Labs
†
Corresponding author
Permission to make digital or hard copies of all or part of this work for
personal or classroom use is granted without fee provided that copies are not
made or distributed for prot or commercial advantage and that copies bear
this notice and the full citation on the rst page. Copyrights for components
of this work owned by others than ACM must be honored. Abstracting with
credit is permitted. To copy otherwise, or republish, to post on servers or to
redistribute to lists, requires prior specic permission and/or a fee. Request
permissions from [email protected].
EuroSys ’19, March 25–28, 2019, Dresden, Germany
© 2019 Association for Computing Machinery.
ACM ISBN 978-1-4503-6281-8/19/03...$15.00
hps://doi.org/10.1145/3302424.3303958
Keywords Microservice, Systems and Machine Learning
ACM Reference Format:
Ram Srivatsa Kannan, Lavanya Subramanian, Ashwin Raju, Jeongseob
Ahn, Jason Mars, and Lingjia Tang. 2019. GrandSLAm: Guaran-
teeing SLAs for Jobs in Microservices Execution Frameworks. In
Proceedings of Fourte enth EuroSys Conference 2019 (EuroSys ’19).
ACM, New York, NY, USA, 16 pages. hps://doi.org/10.1145/3302424.
3303958
1 Introduction
The microservice architecture along with cloud computing
is dramatically changing the landscape of software develop-
ment. A key distinguishing aspect of the microservice archi-
tecture is the availability of pre-existing, well-dened and
implemented software services by cloud providers. These
microservices can be leveraged by the developer to construct
their applications without perturbing the underlying hard-
ware or software requirements. The user applications can,
therefore, be viewed as an amalgamation of microservices.
The microservice design paradigm is widely being utilized
by many cloud service providers driving technologies like
Serverless Computing [3, 5, 13, 14, 19, 20].
Viewing an application as a series of microservices is help-
ful especially in the context of datacenters where the appli-
cations are known ahead of time. This is in stark contrast
to the traditional approach where the application is viewed
as one monolithic unit and instead, lends a naturally seg-
mentable structure and composition to applications. Such
behavior is clearly visible for applications constructed using
articial intelligence and machine learning (AI and ML) ser-
vices, an important class of datacenter applications which
has been leveraging the microservice execution framework.
As a result, it opens up new research questions especially
in the space of multi-tenant execution where multiple jobs,
applications or tenants share common microservices.
Multi-tenant execution has been explored actively in the
context of traditional datacenters and cloud computing frame-
works towards improving resource utilization [
10
,
31
,
41
,
48
]. Prior studies have proposed to co-locate high priority
latency-sensitive applications with other low priority batch
applications [
31
,
48
]. However, the multi-tenant execution

EuroSys ’19, March 25–28, 2019, Dresden, Germany RS Kannan et al.
0 500 1000 1500 2000 2500 3000 3500 4000
Requests served
0
200
400
600
800
1000
1200
Latency
stage 1 stage 2 stage 3 stage 4
Image solo Image colo SLA
(a) Image Querying: SLA is not violated
Stage 1 Stage 2 Stage 3 Stage 4
Image Recognition
Speech Recognition
Natural Language
Understanding
Output
Output
input
input
Text to Speech
Question
Answering
(b) Sharing NLU and QA microservices
0 500 1000 1500 2000 2500 3000 3500 4000
Requests served
0
200
400
600
800
1000
1200
1400
1600
1800
2000
Latency
stage 1 stage 2 stage 3
IPA solo
IPA colo
SLA
(c) IPA: SLA is violated
Figure 1.
Sharing the two common microservices between
Image Querying and Intelligent Personal Assistant applica-
tions
in a microservice based computing framework would oper-
ate on a fundamentally dierent set of considerations and
assumptions since resource sharing can now be viewed at a
microservice granularity rather than at an entire application
granularity.
Figure 1b illustrates an example scenario in which an
end-to-end Intelligent Personal Assistant (IPA) application
shares the
Natural Language Understanding
(NLU) and
Question Answering
(QA) microservices with an image
based querying application. Each of these applications is
constructed as an amalgamation of dierent microservices
(or stages). In such a scenario, the execution load in these
particular microservices increases, thereby causing the la-
tency of query execution in stages 2 and 3 to increase. This
increase in latency at specic stages aects the end-to-end
latency of the IPA application, thereby violating service level
agreements (SLAs). This phenomenon is illustrated by Fig-
ure 1c and Figure 1a. The x-axis represents the number of
requests served while the y-axis denotes latency. Horizontal
dotted lines separate individual stages. As can be seen, the
SLA violation for the image querying application in Figure 1a
is small, whereas the IPA application suers heavily from
SLA violation. However, our understanding of the resource
contention need not stop at such an application granular-
ity, unlike traditional private data centers. It can rather be
broken down into contention at the microservice granular-
ity, which makes resource contention management a more
tractable problem.
This fundamentally dierent characteristic of microser-
vice environments motivates us to rethink the design of
runtime systems that drive multi-tenancy in microservice ex-
ecution frameworks. Specically, in virtualized datacenters,
consolidation of multiple latency critical applications is lim-
ited, as such scenarios can be performance intrusive. In par-
ticular, the tail latency of these latency critical applications
could increase signicantly due to the inter-application inter-
ference from sharing the hardware resources [
31
,
32
,
48
,
51
].
Even in a private datacenter, there is limited visibility into
application specic behavior and SLAs, which makes it hard
even to determine the existence of such performance intru-
sion [
27
]. As a result, cloud service providers would not be
able to meet SLAs in such execution scenarios that co-locate
multiple latency critical applications. In stark contrast, the
execution ow of requests through individual microservices
is much more transparent.
We observe that this visibility creates a new opportunity
in a microservice-based execution framework and can enable
high throughput from consolidating the execution of multi-
ple latency critical jobs, while still employing ne-grained
task management to prevent SLA violations. In this context,
satisfying end-to-end SLAs merely becomes a function of
meeting disaggregated partial SLAs at each microservice
stage through which requests belonging to individual jobs
propagate. However, focusing on each microservice stage’s
SLAs standalone misses a key opportunity, since we observe
that there is signicant variation in the request level execu-
tion slack among individual requests of multiple jobs. This
stems from the variability that exists with respect to user
specic SLAs, which we seek to exploit.
In this study, we propose GrandSLAm, a holistic runtime
framework that enables consolidated execution of requests
belonging to multiple jobs in a microservice-based comput-
ing framework. GrandSLAm does so by providing a predic-
tion based on identifying
safe
consolidation to deliver satis-
factory SLA (latency) while maximizing throughput simul-
taneously. GrandSLAm exploits the microservice execution
framework and the visibility it provides especially for AI and
ML applications, to build a model that can estimate the com-
pletion time of requests at dierent stages of a job with high
accuracy. It then leverages the prediction model to estimate
per-stage SLAs using which it (1) ensures end-to-end job
latency by reordering requests to prioritize those requests
with low computational slack, (2) batches multiple requests
to the maximum extent possible to achieve high throughput
under the user specied latency constraints. It is important
to note that employing each of these techniques standalone
does not yield SLA enforcement. An informed combination
Guaranteeing SLAs for Jobs in Microservice Execution Frameworks EuroSys ’19, March 25–28, 2019, Dresden, Germany
of request re-ordering with a view of end-to-end latency
slack and batching is what yields eective SLA enforcement,
as we demonstrate later in the paper. Specically, this paper
makes the following contributions:
• Analysis of microservice execution scenarios.
Our
investigation observes the key dierences between tra-
ditional and microservice-based computing platforms –
primarily in the context of visibility into the underlying
microservices that provide exposure to application spe-
cic SLA metrics.
• Accurate estimation of completion time at individ-
ual microservice stages.
We build a model that esti-
mates the completion time of individual requests at the
dierent microservice stages and hence, the overall time
of completion. We have demonstrated high accuracy in
estimating completion times, especially for AI and ML
microservices.
• Guarantee end-to-end SLAs by exploiting stage level
SLAs.
By utilizing the completion time predictions from
the model, we derive individual stage SLAs for each mi-
croservice/stage. We then combine this per-stage SLA re-
quirement with our understanding of end-to-end latency
and slack. This enables an ecient request scheduling
mechanism towards the end goal of maximizing server
throughput without violating the end-to-end SLA.
Our evaluations on a real system deployment of a 6 node
CPU cluster coupled with graphics processing accelerators
demonstrates GrandSLAm’s capability to increase the through-
put of a datacenter by up to 3
×
over the state-of-the-art re-
quest execution schemes for a broad range of real-world ap-
plications. We perform scale-out studies as well that demon-
strate increased throughput while meeting SLAs.
2 Background
In this section, we rst describe the software architecture
of a typical microservice and its execution framework. We
then describe unique opportunities a microservice frame-
work presents as compared to a traditional datacenter, for
an ecient redesign.
2.1 Microservices Software Architecture
The microservice architecture is gaining popularity among
software engineers, since it enables easier application devel-
opment and deployment while not having to worry about the
underlying hardware and software requirements. Microser-
vices resemble well-dened libraries that perform specic
functions, which can be exposed to consumers (i.e., appli-
cation developers) through simple APIs. With the microser-
vice paradigm approach, instead of writing an application
from scratch, software engineers leverage these microser-
vices as building blocks to construct end-to-end applications.
The end-to-end applications consist of a chain of microser-
vices many of which are furnished by the datacenter service
providers. Microservice based software architectures speed
up deployment cycles, foster application-level innovation
by providing a rich set of primitives, and improve main-
tainability and scalability, for application classes where the
same building blocks tend to be used in many application
contexts [13].
Traditional, multi-tier architectures compartmentalize ap-
plication stages based on the nature of services into dier-
ent tiers. In most cases, application stages belong to either
the presentation layer which focuses on the user interface,
application processing layer in which the actual applica-
tion execution occurs and the data management layer which
stores data and metadata belonging to the application. This is
fundamentally dierent from the microservice architecture.
Microservices, at each stage in a multi-stage application, per-
form part of the processing in a large application. In other
words, one can imagine a chain of microservices to constitute
the application processing layer.
2.2 Microservices Use Cases
With the advent of Serverless Computing design, the mi-
croservices paradigm is being viewed as a convenient solu-
tion for building and deploying applications. Several cloud
service providers like Amazon (AWS Lambda [
3
]) and IBM
(IBM Bluemix [
29
]) utilize the microservice paradigm to of-
fer services to their clients. Typically, microservices hosted
by cloud service providers provide the necessary function-
ality for each execution stage in every user’s multi-stage
application. In this context, a motivating class of applica-
tions that would benet from the microservice paradigm
is articial intelligence (AI) and machine learning (ML) ap-
plications [
39
]. Many of the stages present in the execu-
tion pipeline of AI applications are common across other
AI applications [
13
]. As shown in the example in Figure 1b,
a speech-input based query execution application is con-
structed as an amalgamation of microservices that performs
speech recognition, natural language understanding, and a
question answering system. Similarly, an image-input based
query system/application also uses several of these same
microservices as its building blocks.
FaaS (Function-as-a-Service) or Serverless based cloud
services contain APIs to dene the workow of a multi-
stage application as a series of steps representing a Directed
Acyclic Graph (DAG). For instance, some of the workow
types (DAGs) that are provided by Amazon as dened by
AWS step functions [
4
] are shown in Figure 2. Elgamal et
al. talk about this in detail [
11
]. Figure 2 (a) shows the sim-
plest case where the DAG is sequential. From our study, we
were able to nd that several real-world applications (Ap-
plications Table 3) and customers utilizing AWS Lambda
possess workow DAGs there were sequential. Figure 2 (b)
shows a workow DAG with parallel steps in which multi-
ple functions are executed in parallel, and their outputs are
aggregated before the next function starts. The last type of

EuroSys ’19, March 25–28, 2019, Dresden, Germany RS Kannan et al.
λ1
λ3
λ2
λ4
λ1
λ4
λ2
λ5
λ5
λ1
λ3
λ2
λ4
(a) Sequential DAGs (b) Parallel DAGs (b) Branching DAGs
Figure 2.
Types of DAGs used in applications based on mi-
croservices
workow DAGs possesses branching steps shown in Figure 2
(c). Such workows typically have a branch node that has a
condition to decide in which direction the branch execution
would proceed. In our paper, we focus only on sequential
workows as shown in Figure 2 (a). In Section 5, we will
discuss the limitation of our study and possible extensions
for the complex workows.
2.3 Challenges
Although the usage and deployment of microservices are fun-
damentally dierent from traditional datacenter applications,
the low resource utilization problem persists even in datacen-
ters housing microservices [
15
,
16
,
40
]. In order to curb this,
datacenter service providers could potentially allow sharing
of common microservices across multiple jobs as shown in
Figure 1b. However, these classes of applications, being user-
facing, are required to meet strict Service Level Agreements
(SLAs) guarantees. Hence, sharing microservices could create
contention, resulting in the violation of end-to-end latency of
individual user-facing applications, thereby violating SLAs.
This is analogous to traditional datacenters where there is a
tendency to actively avoid co-locating multiple user-facing
applications, leading to over-provisioning of the underlying
resources when optimizing for peak performance [6].
2.4 Opportunities
However, the microservice execution environments funda-
mentally change several operating assumptions present in
traditional datacenters that enable much more ecient multi-
tenancy, while still achieving SLAs. First, the microservice
execution framework enables a new degree of visibility into
an application’s structure and behavior, since an applica-
tion is comprised of microservice building blocks. This is
dierent from traditional datacenter applications where the
application is viewed as one monolithic unit. Hence, in such
a traditional datacenter, it becomes very challenging to even
identify, let alone prevent interference between co-running
applications [
27
,
31
,
48
]. Second, the granularity of multi-
tenancy and consolidation in a microservice framework is
0 8 16 24 32
Sharing degree
0
400
800
1200
1600
Latency (ms)
(a) Latency
0 8 16 24 32
Sharing degree
0
40
80
120
160
Throughput (QPS)
(b) Throughput
64 128 256
Input size
0
2000
4000
6000
Latency (ms)
(c) Input size
Figure 3.
Increase in latency, throughput, and input size as
the sharing degree increases
distinctively dierent from traditional datacenter systems.
Application consolidation in microservice execution plat-
forms is performed at a ne granularity, by batching mul-
tiple requests belonging to dierent tenants, to the same
microservice [
16
]. On the other hand, for traditional datacen-
ter applications, multi-tenancy is handled at a very coarse
granularity where entire applications belonging to dierent
users are co-scheduled [
27
,
31
,
44
,
45
,
48
]. These observations
clearly point to the need for a paradigm shift in the design
of runtime systems that can enable and drive multi-tenant
execution where dierent jobs share common microservices
in a microservice design framework.
Towards rethinking runtime systems that drive multi-
tenancy in microservice design frameworks, we seek to iden-
tify and exploit key new opportunities that exist, in this
context.
First, the ability to accurately predict the time
each request spends at a microservice even prior to
its execution op ens up a key opportunity towards per-
forming safe consolidations without violating SLAs.
This, when exploited judiciously, could enable the sharing
of microservices that are employed across multiple jobs,
achieving high throughput, while still meeting SLAs.
Sec-
ond, the variability existing in SLAs when multiple la-
tency sensitive jobs are consolidated generates a lot of
request level execution slack that can be distributed
across other requests.
In other words, consolidated execu-
tion is avoided for requests with low execution slack and vice
versa. These scenarios create new opportunities in the mi-
croservice execution framework to achieve high throughput
by consolidating the execution of multiple latency sensi-
tive jobs, while still achieving user-specic SLAs, through
ne-grained task management.
3 Analysis of Microservices
This section investigates the performance characteristics
of emerging AI and ML services utilizing the pipelined mi-
croservices. Using that, we develop a methodology that can
accurately estimate completion time for any given request at
each microservice stage prior to its execution. This informa-
tion becomes benecial towards safely enabling ne-grained
request consolidation when microservices are shared among
dierent applications under varying latency constraints.
Guaranteeing SLAs for Jobs in Microservice Execution Frameworks EuroSys ’19, March 25–28, 2019, Dresden, Germany
3.1 Performance of Microservices
In this section, we analyze three critical factors that deter-
mine the execution time of a request at each microservice
stage:
(1) Sharing degree (2) Input size (3) Queuing de-
lay
. For this analysis, we select a microservice that performs
image classification
(IMC) which is a part of the catalog
of microservices oered by AWS Step Functions [39].
(1) Sharing degree.
Sharing degree denes the granularity
at which requests belonging to dierent jobs (or applica-
tions) are batched together for execution. A sharing degree
of one means that the microservice processes only one re-
quest at a time. This situation arises where a microservice
instance executing a job restricts sharing its resources si-
multaneously for requests belonging to other jobs. Requests
under this scheme can achieve low latency at the cost of low
resource utilization. On the other hand, a sharing degree of
thirty indicates that the microservice merges thirty requests
into a single batch to process the requests belonging dier-
ent jobs simultaneously. Increasing the sharing degree has
demonstrated to increase the occupancy of the underlying
computing platform (especially for GPUs) [
16
]. However, it
has a direct impact on the latency of the executing requests
as the rst request arriving at the microservice would end
up waiting until the arrival of the 30th request when the
sharing degree is 30.
Figures 3a and 3b illustrate the impact of sharing degree
on latency and throughput. The inputs that we have used for
studying this eect is a set of images with dimension 128x128.
The horizontal axes on both gure 3a and 3b represent the
sharing degree. The vertical axis in gure 3a and 3b repre-
sents latency in milliseconds and throughput in requests per
second respectively. From gures 3a and 3b, we can clearly
see that the sharing degree improves throughput. However,
it aects the latency of execution of individual requests as
well.
(2) Input size.
Second, we observe changes in the execution
time of a request by varying its input size. As the input
size increases, additional amounts of computation would be
performed by the microservices. Hence, input sizes play a
key role in determining the execution time of requests. To
study this using the image classication (IMC) microservice,
we obtain request execution times for dierent input sizes
of images from 64x64 to 256x256. The sharing degree is kept
constant in this experiment. Figure 3c illustrates the ndings
of our experiment. We observe that as input sizes increase,
execution time of requests also increase. We also observed
similar performance trends for other microservice types.
(3) Queuing delay.
Queuing delay is the last factor that
aects execution time of requests. This is experienced by
requests waiting on previously dispatched requests to be
completed. From our analysis, we observe that there is a
linear relationship between the execution time of a request
0 2 4 6 8 10 12 14
Small input
−30
−20
−10
0
10
20
30
Error (%)
IMC FACED FACER HS
2 4 6 8 10 12 14
Medium input
−30
−20
−10
0
10
20
30
2 4 6 8 10 12 14
Large input
−30
−20
−10
0
10
20
30
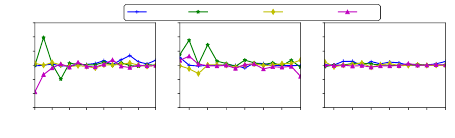
Figure 4.
Error(%) in predicting ETC for dierent input sizes
with increase in the sharing degree (x-axis)
its sharing degree and input size respectively. Queuing de-
lay can be easily calculated at runtime using the execution
sequences of requests, the estimated execution time of indi-
vidual requests and its preceding requests.
From these observations, we conclude that there is an
opportunity to build a highly accurate performance model
for each microservice that our execution framework can
leverage to enable sharing of resources across jobs. Further,
we also provide capabilities that can control the magnitude
of sharing at every microservice instance. These attributes
can be utilized simultaneously for preventing SLA violations
due to microservice sharing while optimizing for datacenter
throughput.
3.2 Execution Time Estimation Model
Accurately estimating the execution time of a request at each
microservice stage is crucial as it drives the entire microser-
vice execution framework. Towards achieving this, we try
to build a model that calculates the estimated time of com-
pletion (ETC) for a request at each of its microservice stages.
The ETC of a request is a function of its compute time on the
microservice and its queuing time (time spent waiting for
the completion of requests that are scheduled to be executed
before the current request).
ETC = T
queuinд
+ T
compute
(1)
We use a linear regression model to determine the
T
compute
of a request, for each microservice type and the input size,
as a function of the sharing degree.
Y = a + bX (2)
where
X
is the sharing degree (batch size) which is an inde-
pendent variable and
Y
is the dependent variable that we try
to predict, the completion time of a request.
b
and
a
are the
slope and intercepts of the regression equation.
T
queuinд
is
determined as the sum of the execution times of the previous
requests that need to be completed before the current request
can be executed on the microservice which can directly be
determined at runtime. Each model obtained is specic to a
single input size. Hence, we design a system where we have
a model for every specic input size that can predict ETC
for varying batch sizes and queuing delays.

EuroSys ’19, March 25–28, 2019, Dresden, Germany RS Kannan et al.
Data normalization.
A commonly followed approach in
machine learning is to normalize data before performing
linear regression so as to achieve high accuracy. Towards
this objective, we rescale the raw input data present in both
dimensions in the range of [0, 1], normalizing with respect
to the min and max, as in the equation below.
x
′
=
x − min
(
x
)
max
(
x
)
− min
(
x
)
(3)
We trained our model for sharing degrees following pow-
ers of two to create a predictor corresponding to every mi-
croservice and input size pair. We cross validated our trained
model by subsequently creating test beds and comparing the
actual values with the estimated time of completion by our
model. Figure 4 shows the error rate that exists in predicting
the completion time, given a sharing degree for dierent in-
put sizes. For the image based microservices, the input sizes
utilized are images of dimensions 64, 128 and 256 for small,
medium and large inputs, respectively. These are standard-
ized inputs from publicly available datasets whose details
are enumerated in Table 1. As can be clearly observed from
the graph, the error in predicting the completion time from
our model is around 4% on average. This remains consistent
across other microservices too whose plots are not shown
in the gure to avoid obscurity.
The estimated time of completion (ETC) obtained from our
regression models is used to drive decisions on how to dis-
tribute requests belonging to dierent users across microser-
vice instances. However, satisfying application-specic SLAs
becomes mandatory under such circumstances. For this pur-
pose, we seek to exploit the variability in the SLAs of indi-
vidual requests and the resulting slack towards building our
request scheduling policy. Later in section 4.2 and 4.3, we
describe in detail the methodology by which we compute
and utilize slack to undertake optimal request distribution
policies.
The ETC prediction model that we have developed is spe-
cic towards microservice types whose execution times can
be predicted prior to its execution. Based on our observa-
tions, applications belonging to the AI and ML space exhibit
such execution characteristics and t well towards being
part of microservice execution frameworks hosted at Server-
less Computing Infrastructures. However, there exist certain
microservice types whose execution times are highly un-
predictable. For instance, an SQL range query’s execution
time and output is dependent both on the input query type
and the data which it is querying. Such microservice types
cannot be handled by our model. We discuss this at much
more detail in Section 5.
4 GrandSLAm Design
This section presents the design and architecture of Grand-
SLAm, our proposed runtime system for moderating request
distribution at micro-service execution frameworks. The goal
Microservice cluster
IMC()
NLU()
QA()
TTS()
… … …
……
ASR()
NLU()
QA()
… … …
…
Job A
Job B
1
ASR
IMC
NLU
QA
2
Building microservice DAG
IMC NLU QA TTS
ASR
NLU QA
Job A’s DAG
Job B’s DAG
Submitting job
TTS
Figure 5. Extracting used microservices from given jobs in
the microservice cluster
of GrandSLAm is to enable high throughput at microservice
instances without violating application specic SLAs. Grand-
SLAm leverages the execution time prediction models to
estimate request completion times. Along with this Grand-
SLAm utilizes application/job specic SLAs, to determine
the execution slack of dierent jobs’ requests at each mi-
croservice stage. We then exploit this slack information for
eciently sharing microservices amongst users to maximize
throughput while meeting individual users’ Service Level
Agreements (SLAs).
4.1 Building Microservice Directed Acyclic Graph
The rst step in GrandSlam’s execution ow is to identify
the pipeline of microservices present in each job. For this
purpose, our system takes the user’s job written in a high-
level language such as Python, Scala, etc. as an input (
1
in Figure 5) and converts it into a directed acyclic graph
(DAG) of microservices (
2
in Figure 5). Here, each vertex
represents a microservice and each edge represents commu-
nication between two microservices (e.g., RPC call). Such
DAG based execution models have been widely adopted
in distributed systems frameworks like Apache Spark [
50
],
Apache Storm [
21
], TensorFlow [
1
],etc. Building a microser-
vice DAG is an oine step that needs to be performed once
before GrandSLAm’s runtime system starts distributing re-
quests across microservice instances.
4.2 Calculating Microservice Stage Slack
The end-to-end latency of a request is a culmination of the
completion time of the request at each microservice stage.
Therefore, to design a runtime mechanism that provides
end-to-end latency guarantees for requests, we take a disag-
gregated approach. We calculate the partial deadlines at each
microservice stage which every request needs to meet at so
that end-to-end latency targets are not violated. We dene

Guaranteeing SLAs for Jobs in Microservice Execution Frameworks EuroSys ’19, March 25–28, 2019, Dresden, Germany
0 5 10 15 20 25 30
Batch Size (CPU)
0
20
40
60
80
100
Slack (%)
Activity Pose
Natural Language
Understanding
Question Answering
Sequence Learning
Figure 6.
Microservice stage slack corresponding to dierent
microservices present in Pose Estimation for Sign Language
application
this as
microservice stage slack
. In other words, microser-
vice stage slack is dened as the maximum amount of time
a request can spend at a particular microservice stage. Stage
slacks are allocated oine after building the microservice
DAG, before the start of the GrandSLAm runtime system.
Mathematically slack at every stage is determined by cal-
culating the proportion of end-to-end latency that a request
can utilize at each particular microservice stage.
slack
m
=
L
m
L
a
+ L
b
· · · + L
m
+ . . .
× SLA (4)
where
L
m
is the latency of job at stage
m
and
L
a
,
L
b
. . .
are
the latency of the same job at the other stages
a, b . . .
respec-
tively. Figure 6 illustrates the proportion of time that should
be allocated at each microservice stage for varying batch
sizes, for a real world application called Pose Estimation for
Sign Language. We can clearly see from Figure 6 that the
percentage of time a request would take to complete the
Sequence Learning stage is much higher than the percentage
of time the same request would take to complete the Activity
Pose stage. Using this observation, requests are allocated
stage level execution slacks proportionally.
4.3 Dynamic Batching with Request Reordering
GrandSLAm’s nal step is an online step orchestrating re-
quests at each microservice stage based on two main objec-
tive functions (i) meeting end-to-end latency (ii) maximizing
throughput. For this purpose, GrandSLAm tries to execute
every request that is queued up at a microservice stage in a
manner at which it simultaneously maximizes the sharing
degree while meeting end-to-end latency guarantees. In this
regard, GrandSLAm undertakes two key optimizations:
1
Request reordering and
2
Dynamic batching as depicted
in Figure 7. GrandSLAm through these optimizations tries
to maximize throughput. However, it keeps a check on the
latency of the executing job by comparing slack possessed by
each request (calculated oine as described at 4.2) with its
execution time estimates (obtained from the model described
at Section 3.2).
7310532
2025 7310532
2025
7310532
2025
3
5710
25
2032
Reordering requests based on the slack
1
2
3
5
7
10
25
2032
Batch size: 3 Batch size: 2 Batch size: 2
Dynamically adjusting the batch size
ASR
IMC
QA
TTS
NLU
Figure 7.
Request reordering and dynamic batching mecha-
nism
Request reordering.
Slack based request reordering is per-
formed at each microservice instance by our runtime system.
The primary objective of our request reordering mechanism
is to prioritize the execution of requests with lower slack
as they possess much tighter completion deadlines. Hence,
our GrandSLAm runtime system reorders requests at run-
time that promotes requests with lower slack to the head
of the execution queue. The request reordering mechanism
in Figure 7 illustrates this with an example. Each rectangle
is a request present in the microservice execution and the
number in each rectangle illustrates its corresponding slack
value. On the left, it shows the status before reordering, and
on the middle, it shows the status after reordering.
Dynamic batching.
At each microservice stage, once the
requests have been reordered using slack, we identify the
largest sharing degree (actual batch size during execution)
that can be employed such that each request’s execution
time is within the allocated microservice stage slack. Such
a safe identication of the largest sharing degree is done
by comparing the allocated slack obtained by the process
described in Section 4.2 with the execution time estimation
model described in Section 3.2.
Algorithm 1 summarizes the dynamic batching approach
that we employ. The input to the algorithm is a queue of re-
quests sorted by their respective slack values. Starting from
the request possessing the lowest slack value we traverse
through the queue increasing the batch size. We perform this
until increasing batch size violates the sub-stage SLA of indi-
vidual requests present in the queue. We repeat the request
reordering and dynamic batching process continuously as
new incoming requests arrive from time to time. Figure 7
shows how the dynamic batching is used in our system from
the middle part to the right part.
4.4 Slack Forwarding
While performing slack based request scheduling in multi-
stage applications, we observed a common scenario. There
is always some leftover slack that remains unused for many
requests. For instance, at the rst stage if the best ETC value
provided for a request is 100ms and the slack allocated for
that stage is 135ms, there is 35ms (135ms - 100ms) leftover
slack. We reutilize this remaining slack, by performing slack
forwarding, wherein we carry forward the unused slack on

EuroSys ’19, March 25–28, 2019, Dresden, Germany RS Kannan et al.
Algorithm 1 Dynamic batching algorithm
1: procedure DynBatch(Q) ▷ Queue of requests
2: star tI d x = 0
3: Slack
q
= 0
4: executed = 0
5: len = l enдth(Q)
6: while executed ≤ QSize do ▷ All are not batched
7: window = 0
8: partQ = Q [st ar tidx : l enдt h]
9: window = дet M axBatchSizeU nder S LA(partQ, Slack
q
)
10: star t I dx = st art Idx + windo w
11: Slack
q
= Sl ack
q
+ latency
12: executed = e x ecuted + window
13: end while
14: end procedure
Leftover slackASRExecution time
ASR
NLU
Slack forwarding
SlackNLU
SlackNLU
+
Leftover SlackASR
1
2
SlackASR
Figure 8.
Forwarding unused slack in the
ASR
stage to the
NLU stage
to the subsequent microservice stages. Figure 8 exemplies
the case where the unused slack in the
ASR
stage can be
forwarded into the next
NLU
microservice stage. This has
increased the overall request slack in the later stages of exe-
cution in a multi-stage application enabling higher sharing
degrees.
5 Discussion
Our approach requires an accurate estimation of the exe-
cution time at each microservice stage. For this purpose, it
becomes essential to determine the factors aecting the exe-
cution time of microservices. This motivated us to develop
an execution time estimation (ETC) model based on a set of
factors based on the application space we have considered.
In this study, we analyzed the performance characteristics of
AI and ML related microservices as these applications were
well suited to be hosted on the microservice architecture.
In this context, we observed two distinct characteristics in
the AI and ML space. First, batching multiple requests into
a single large one is widely used in these microservices to
improve the resource utilization of the computing devices.
For this purpose, these microservices performs preprocess-
ing of inputs (e.g., resizing images in image classications,
splitting voice inputs in speech recognition, chunking words
in natural language processing) to t in a single batch for
simultaneous execution. Second, many of the AI applica-
tions exhibit the pipelined execution of microservices. Image
recognition, an application from AWS Step Functions [
39
]
is one such example. Such simple linear pipelines make it
much easier to design slack-based optimizations introduced
in Section 4.
Limitations.
However, we anticipate that our methodology
cannot be applied directly to microservice types other than
AI and ML space. For example, a simple model that we have
proposed is not sucient for other types of microservices
which do not batch queries belonging to dierent applica-
tions. For example, the execution time of the microservices
executing SQL range queries, will be sensitive on both the in-
put query and output results. In other words, similar queries
executed on dierent datasets might possess dierent execu-
tion times. In such circumstances, it requires a much more
detailed analysis and investigation on application types for
building much more sophisticated models. In addition to that,
the complex microservice topologies such as general graphs
and conditional execution have not been considered in this
study. It is challenging for GrandSLAm in its existing form to
calculate slacks in cases where dierent requests take dier-
ent paths at runtime or need to perform a few microservices
in parallel. These are some of the limitations of GrandSLAm
which we plan to investigate in the near future.
6 Evaluation
In this section, we evaluate GrandSLAm’s policy and also
demonstrate its eectiveness in meeting service level agree-
ments (SLAs), while simultaneously achieving high through-
put in datacenters that house microservices.
6.1 Experimental Environments
Infrastructure.
We evaluate GrandSLAm on a testbed con-
sisting of 100 docker containers. Each container has a single
2.4 GHz CPU core, 2GB of RAM and runs Ubuntu 16.10.
GrandSLAm is evaluated on both CPU as well as GPU plat-
forms as enumerated in Table 2. Today’s datacenters house
dierent kinds of accelerators improving the performance
of AI and ML applications [
16
,
17
,
34
,
36
,
38
]. We setup a
topology of services and processes according to that of
IBM
Bluemix
[
13
]. In other words, each microservice executes
on containerized execution environments. We use docker
containers for this purpose.
Microservice types.
Table 1 shows the list of microservices
that we have utilized in our experiments.
POS, CHK,
and
NER
microservices utilize the kernels from Djinn&Tonic [
16
]
suite which in turn uses SENNA [
9
]. Similarly, ASR microser-
vice utilizes kernels from Djinn& Tonic suite [
16
], which in
turn uses Kaldi [
37
].
IMC, FACED, FACER, AP, HS, QA,
and
SL
microservices are implemented using
TensorFlow
framework version 1.0 [1].

Guaranteeing SLAs for Jobs in Microservice Execution Frameworks EuroSys ’19, March 25–28, 2019, Dresden, Germany
Type Application Input Sizes Output Network Type Layers Parameters
Image Services
Image Classication (IMC)
64X64, 128X128
and 256 X 256 images
Probability of an object Alexnet CNN 8 15M
Face Detection (FACED) Facial Key Points Xception CNN 9 58K
Facial Recognition (FACER) Probability of a person VGGNet CNN 14 40M
Human Activity Pose (AP) Probability of a pose deeppose CNN 8 40M
Human Segmentation (HS) Presence of a body part VGG16 CNN 16 138M
Speech Services
Speech Recognition (ASR)
52.3KB, 170.2KB audio
Raw text NNet3 DNN 13 30M
Text to Speech (TTS) Audio output WaveNet DNN 15 12M
Text Services
Part-of-Speech Tagging (POS)
text containing 4-70
words per sentence
WordâĂŹs part of speech eg. Noun SENNA DNN 3 180K
Word Chuncking (CHK) Label Words as begin chunk etc. SENNA DNN 3 180K
Name Entity Recognition (NER) Labels words SENNA DNN 3 180K
Question Answering (QA) Answer for question MemNN RNN 2 43K
Sequence Learning (SL) Translated text seq2seq RNN 3 3072
General Purp ose
Services
NoSQL Database (NoSQL) Directory input Output of Query N/A N/A N/A N/A
Web Socket Programmig (WS) Text, image Data communication N/A N/A N/A N/A
Table 1. Summary of microservices and their functionality
CPU/GPU cong Microarchitecture
Intel Xeon E5-2630 @2.4 GHz Sandy Bridge-EP
Intel Xeon E3-1420 @3.7 GHz Haswell
Nvidia GTX Titan X Maxwell
GeForce GTX 1080 Pascal
Table 2. Experimental platforms
Application Description Pipelined microservices
IPA-Query
Provides answers to queries that
are given as input through voice.
ASR→NLP→QA
IMG-Query
Generates natural language descri-
ptions of the images as output.
IMG→NLP→QA
POSE-Sign
Analyzes interrogative images
and provides answers.
AP→NLP→QA→SL
FACE-Security
Scans images to detect the presence
of identied humans.
FACED→FACER
DETECT-Fatigue
Detects in real time the onset
of sleep in fatigued drivers.
HS→AP→FACED→FACER
Translation Performs language translation. SL QA NoSQL
Table 3. Applications used in evaluation
Applications Shared microservices
WL1 IMG-Query, FACE-Security, DETECT-Fatigue, POSE-Sign QA, FACED, FACER, AP
WL2 IPA-Query, POSE-Sign, Translation NLU, QA
WL3 I/O-IPA-Query, I/O-Sign, I/O-Translation NLU, NoSQL
Table 4. Workload scenarios
Load generator/Input.
To evaluate the eectiveness of
GrandSLAm, we design a load generator that submits user
requests following a Poisson distribution that is widely used
to mimic cloud workloads [
33
]. The eect of performance
degradation at multi-tenant execution scenarios is luminous
extensively at servers handling high load. Hence, our experi-
ments are evaluated at scenarios in datacenters where the
load is high. Such a distribution has been used by several
prior works on multi-stage applications [
42
,
47
,
49
]. The SLA
that we use for each application is obtained and calculated
from the methodology proposed by PowerChief [
49
]. Ta-
ble 4 shows the workload table and the microservices that
are shared when they are executed together. For each mi-
croservice request we have evaluated our methodology using
inputs that correspond to data that is available from open
source datasets.
WL1 WL2 WL3
0
20
40
60
80
100
SLA violations (%)
Baseline
Baseline + reordering
Baseline + dynamic batching
GrandSLAm
(a) Percentage of requests that violate SLA
WL1 WL2 WL3
0
5000
10000
15000
20000
25000
30000
99% Tail Latency (ms)
(b) 99th Percentile tail latency of each application
Figure 9.
Comparing the eect of dierent components
present in GrandSLAm’s policy
6.2 Achieving Service Level Agreements (SLAs)
First, we evaluate the eectiveness of GrandSLAm in achiev-
ing Service Level Agreements (SLAs) for the workload sce-
narios enumerated in Table 4. For this purpose, we introduce
reordering and batching incrementally over the baseline sys-
tem and try to study its eects on the percentage of SLA
violations.
6.2.1 Reducing SLA Violations
For this experiment, we deployed a docker container in-
stance for each microservice type. Communication across
microservice instances within the cluster happens through
web sockets. Under this experimental setup, we rst obtain
the percentage of requests violating SLA under a
baseline
scheme
which executes requests (i)in a rst-in-rst-out
(FIFO) fashion (ii)without sharing the microservices. Sub-
sequently, we introduce a request re-ordering scheme that
executes requests in an Earliest Deadline First (EDF) fash-
ion to compare it with the baseline system. Similarly, we
also execute requests in a situation where requests share
microservice instances(using query batching) to see how it

EuroSys ’19, March 25–28, 2019, Dresden, Germany RS Kannan et al.
1500 1800 2100 2400 2700 3000
Latency (ms)
0.0
0.2
0.4
0.6
0.8
1.0
Cumulative distributions
of latencies (%)
IPA-WL2 Pose-WL2
1500 1800 2100 2400 2700 3000 3300
Latency (ms)
IPA-WL2 Pose-WL2
(a) EDF-DNB vs. GrandSLAm
1500 1800 2100 2400 2700 3000
Latency (ms)
0.0
0.2
0.4
0.6
0.8
1.0
Cumulative distributions
of latencies (%)
IPA-WL3 Pose-WL3
1500 1800 2100 2400 2700 3000 3300
Latency (ms)
IPA-WL3 Pose-WL3
(b) EDF-50 vs. GrandSLAm
800 1800 2800 3800 4800 5800
Latency (ms)
0.0
0.2
0.4
0.6
0.8
1.0
Cumulative distributions
of latencies (%)
Pose-WL2 Translate-WL2
800 1800 2800 3800 4800 5800
Latency (ms)
Pose-WL2 Translate -WL2
(c) ED-DNB vs. GrandSLAm
1800 2100 2400 2700 3000
Latency (ms)
0.0
0.2
0.4
0.6
0.8
1.0
Cumulative distributions
of latencies (%)
Face Security-WL1 Fatigue Driver-WL1
1000 1300 1600 1900 2200 2500 2800
Latency (ms)
Face Security-WL1 Fatigue Driver-WL1
(d) ED-30 vs. GrandSLAm
Figure 10. Comparing the cumulative distribution function of latencies for prior approaches and GrandSLAm.
improves performance. Lastly, we compare GrandSLAm with
these schemes to illustrate its eectiveness. Our experiment
keeps the input load constant at xed Requests per Second
(RPS) while comparing each policy.
Figure 9 shows the results of this experiment. From Fig-
ure 9a, we can clearly see that for a given workload, almost
all of the requests violate SLAs under the baseline and re-
ordering policies. However, the eect is much amortized
when requests are grouped together in batches. This is be-
cause batching can improve the overall latency of a multi-
tude of requests collectively [
16
]. This is clearly evident from
the percentage of requests violated under baseline+dynamic
batching policy. GrandSLAm utilizes best of both the policies
where it ends up having a low percentage of requests that
violate SLAs.
6.3 Comparing with Prior Techniques
Prior approaches which try to solve this problem are catego-
rized based on their respective (i) batching policies for aggre-
gating requests and (ii) slack calculation policies for reorder-
ing requests. Most relevant work use a no-batching policy
where they do not batch multiple requests. Djinn&Tonic [
16
]
utilizes a static batching policy where they used a xed batch
size for all applications. However, we propose a dynamic
batching technique which varies the batch size based on the
slack available for each request. Again, with respect to slack
calculation policy, prior approaches [
21
,
50
] utilize an equal
division slack allocation (
ED
) policy which equally divides
slack across individual microservice stages. Certain other
approaches utilize a rst-in-rst-out policy while most ap-
proaches utilize earliest deadline rst (
EDF
) slack allocation
policy [
42
,
47
]. However, we propose a slack calculation pol-
icy which allocates slack taking into account the intrinsic
variation present in the execution time of dierent computa-
tional stages. This is explained in Section 4.2.
We derive 4 baselines on equal division policy.
ED-NB
(equal division no batch) disables batching,
ED-30
and
ED-50
statically x batch size to 30 and 50 respectively, and
ED-DNB
(equal division dynamic batch) utilizes the dynamic batching
approach proposed by GrandSLAm along with the
ED
policy.
We also derive 4 baselines on using earliest deadline rst pol-
icy:
EDF-NB, EDF-30, EDF-50
and
EDF-DNB
, respectively.
GrandSLAm’s policy is abbreviated as GS in our graphs.
6.3.1 Reordering Requests based on Slack
In this subsection, we quantify the eectiveness of Grand-
SLAm’s slack calculation and reordering policy by compar-
ing it with
ED
and
EDF
. We illustrate this using the cumu-
lative distribution function (CDF) of latencies, as shown in
Figure 10. We have used the same experimental setup where
the conguration of the input load and the number of mi-
croservice instances remains constant.
Figures 10a, 10b, 10c and 10d compare the cumulative dis-
tribution function (CDF) of the policies
EDF-DYN, EDF-50,
ED-DYN,
and
ED-30
, respectively with GrandSLAm. The hor-
izontal axis denotes time. The vertical axis denotes the CDF
of the percentage of requests executed at a particular time.
The dashed lines correspond to the target SLAs that individ-
ual applications are subjected to meet. For each gure, the
graph in the left portrays the CDF of the baseline techniques
(
EDF-DYN, EDF-50, ED-DYN,
and
ED-30
) and the graph in
the right portrays the CDF of GrandSLAm. The green shaded
portion illustrates the leftover slack at the nal stage when
requests execute before the deadline. The red shaded portion
illustrates slack violation when requests execute after the
deadline has passed. In an ideal case, both green and red por-
tions should be minimized. In other words, requests should

Guaranteeing SLAs for Jobs in Microservice Execution Frameworks EuroSys ’19, March 25–28, 2019, Dresden, Germany
ED
NB
ED
30
ED
50
ED
DYB
EDF
NB
EDF
30
EDF
50
EDF
DYB
GS ED
NB
ED
30
ED
50
ED
DYB
EDF
NB
EDF
30
EDF
50
EDF
DYB
GS ED
NB
ED
30
ED
50
ED
DYB
EDF
NB
EDF
30
EDF
50
EDF
DYB
GS
0
1000
2000
3000
4000
Avg. latency (ms)
WL1 WL2 WL3
Queuing Delay IMC NLU QA AP SL NoSQL
(a) Average latency
ED
NB
ED
30
ED
50
ED
DYB
EDF
NB
EDF
30
EDF
50
EDF
DYB
GS ED
NB
ED
30
ED
50
ED
DYB
EDF
NB
EDF
30
EDF
50
EDF
DYB
GS ED
NB
ED
30
ED
50
ED
DYB
EDF
NB
EDF
30
EDF
50
EDF
DYB
GS
0
1000
2000
3000
4000
99th% Tail
latency (ms)
WL1 WL2 WL3
(b) 99th Percentile tail latency
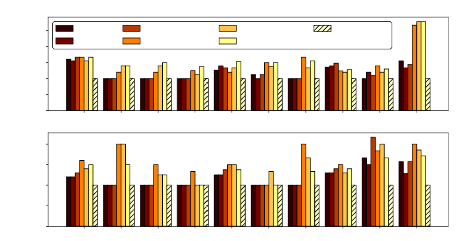
Figure 11.
Comparing the latency of workloads under dierent policies. GrandSLAm has the lowest average and tail latency.
be reordered and batched in such a way that it neither passes
the deadline nor executes way ahead of the deadline. Execut-
ing way ahead of the deadline restricts requests with lower
slack to stall creating a situation where other requests end up
violating SLAs. In an ideal situation, slack remaining should
be transferred to the requests who are about to violate slack.
From these graphs, we draw the following conclusion. As
shown in Figure 10a, 10b, 10c and 10d requests reordering
policies proposed by prior literature creates a situation where
a few requests execute much before the expected deadline
while other requests end up violating the SLAs.
Figure 10a and 10b compare
EDF
with
GrandSLAm
. EDF’s
slack allocation policy for each request is agnostic to the in-
trinsic variation present in the microservice execution stages
within an application. Hence, in many instances, it underes-
timates execution times of requests and performs aggressive
batching. As a result of this, some requests complete their
execution well ahead of the latency targets while other re-
quests end up violating SLAs. GrandSLAm, on the other hand,
avoids this situation by allocating slack that is proportional
to the time that would be taken at each stage. GrandSLAm
performs judicious batching while limiting aggressive batch-
ing by introducing sub-stage SLAs. This is clearly illustrated
in Figure 10a. Pose and IPA are two applications present
in WL2. Under EDF’s policy, we see that the requests cor-
responding to the Pose application complete well ahead of
time (as shown in the green patch). However, a substantial
number of requests corresponding to the IPA violate SLAs(as
shown in the red patch). GrandSLAm, on the other hand,
carefully reallocates slack among applications. Hence, the
execution of requests with abundant slack is stalled until
just before the deadline thereby allowing requests with less
amount of slack to be executed, preventing them from vi-
olating SLAs. The can clearly be seen in Figure 10a as the
amount of green and red patches are much lesser for Grand-
SLAm. A similar phenomenon can be witnessed for EDF’s
static batching policy with batch size 50 in Figure 10b.
Figure 10c and 10d compare
ED
with
GrandSLAm
. The ma-
jor drawback of the ED technique lies in its inability to gauge
the slack that should be allocated in each stage. This is clearly
illustrated in Figure 10c and 10d. In many cases, it wrongly
allocates more slack to requests that do not require it, while
depriving other requests that actually need slack. This intro-
duces additional queuing time, thereby violating the SLA for
a substantial amount of requests. This could be avoided if
slack is being distributed judiciously across requests. Grand-
SLAm is cognizant of this need and hence, predicts the ap-
propriate amount of compute time required for each stage
and allocates slack proportionally.
6.3.2 Dynamic Batching for Latency Reduction
In order to study the eects of dynamic batching, we compare
GrandSLAm with all our baseline policies. Figure 11 and 12
illustrate the results of this experiment. In Each stacked bar
in Figure 11a and 11b represents the average latencies and
the tail latencies of the applications respectively. The poli-
cies in each gure are ordered starting from
ED-NB
followed
by
ED-30, ED-50, ED-DYN, EDF-NB, EDF-30, EDF-50,
EDF-DYN
concluding with GrandSLAm as GS respectively.
GrandSLAm is distinctively distinguished from other bars
by hatching it with slanting lines. The color in the stacked
graph corresponds to either queuing latency experienced at
any stage or the compute latency at individual microservice
stages. The dierent components of this plot are stacked

EuroSys ’19, March 25–28, 2019, Dresden, Germany RS Kannan et al.
breaking the end-to-end latency as queuing latency or com-
pute stage delay over time (which is why there is a queuing
latency stack after each stage). As can be seen in Figure 11a,
GrandSLAm achieves the lowest latency across all policies.
GrandSLAm is able to meet the required SLA for almost ev-
ery request, as compared to prior policies that violate SLAs
for several of these requests. We draw the following insights
into why prior policies are ineective in meeting SLAs.
No batching techniques.
The latency of requests is com-
pletely dominated by the queueing latency when employing
techniques that don’t perform batching, namely ED-NB and
EDF-NB. Hench, such policies are undesirable.
Static batching techniques.
In view of the clear disadvan-
tage when requests are not batched, statically batching them
is one of the simplest policies that can be employed to im-
prove throughput. However, latencies and SLAs could be
compromised if they are not batched judiciously.
Assigning a large xed batch size for execution can criti-
cally violate the latency of many requests within that par-
ticular batch. Let us take WL1 for example. From Figure 11a
and 11b we see that employing a xed batch size (batch size
50) under EDF policy violates SLA only by a small propor-
tion. However, it violates the SLA for most requests present
in the workload. This can be seen in Figure 12 where the
percentage of violations for WL1 under ED-50 goes up to
60%. This is caused because of using a large batch size re-
sulting in a situation where every request ends up violating
the SLA especially at the last stage of the application. This is
because a xed batch size is not aware of the latencies and
slack of requests that are executing at a point in time. This
is an unfavorable outcome especially for applications that
require strict latency targets.
To remedy this, employing smaller batch sizes could be
viewed as a favorable solution. However, smaller batch sizes
can be conservative, thereby not being able to exploit the
potential opportunities where aggressive batching can in-
crease throughput while still meeting the latency constraints.
Furthermore, small batch sizes could also cause excessive
queuing. Specically, when requests are grouped with small
batch sizes, the rst few batches might have low queuing
delays. However subsequent batches of requests would end
up waiting for a substantial period of time for the execution
of prior batches of requests to complete, thereby aecting the
end-to-end latency. This increase in queueing latency at the
later stages can be clearly seen in situations created by WL2
(from gure 11a and 11b ) where policies ED-30 and EDF-30
violates SLAs both in terms of average latencies as well as
tail latencies. Additionally, many requests also violate SLAs
as queuing becomes a huge problem due to large batch sizes.
This can be seen in gure 12. These observations strongly
motivate a dynamic batching policy where batch sizes are
determined online, during runtime, depending upon each
application’s latency constraints.
WL1 WL2 WL3
0
20
40
60
80
100
SLA violations (%)
ED-NB
ED-30
ED-50
ED-DNB
TT-NB
TT-30
TT-50
TT-DNB
GS
Figure 12.
Percentage of requests violating SLAs under dif-
ferent schemes
Dynamic batching.
Equal Division dynamic batching, Ear-
liest Deadline First dynamic batching and Grand Slam deter-
mines appropriate batch sizes during runtime. The dierence
between these three policies is the way by which they com-
pute slack. Once slack is computed, the largest batch size
which accommodates all the requests without violating its
slack is obtained during runtime. For Equal Division dynamic
batching, slack for each request is a fair share from the SLA
for each stage in the end-to-end pipeline. For instance, for an
application consisting of 3 stages, each request of that appli-
cation is estimated to have a slack of 33% of the SLA at each
stage. Earliest Deadline rst approach, however, undertakes
a greedy approach wherein the slack for each request of an
application at each stage is the remaining time the request
possesses before it would end up violating the SLA. Grand-
SLAm is unique and distinct from all these mechanisms. We
adopt the methodology elaborated in Section 4.2 that is cog-
nizant of the volume of computation each individual stage
performs.
In Figures 11a and 11b we clearly see that both Equal
Division dynamic batching and Earliest Deadline First dy-
namic batching perform poorly. This is due to the following
reasons. First, the policy that Earliest Deadline First (EDF)
utilizes to determine the appropriate batch size for a set of
requests is a greedy policy. EDF dynamically selects batch
sizes for the requests aggressively until there is remaining
slack. Although this can be benecial for traditional data-
center applications where execution can only be thought of
as single stage and monolithic, such an approach performs
poorly at microservice execution framework that possesses
multistage execution pipelines. This is due to the fact that
when requests reach the nal stages of execution, they have
a limited amount of slack, which in turn restricts the amount
of batching possible to avoid potential SLA violations due
to excessive batching. Such a policy has two key downsides,
First, it increases the queuing time for subsequent requests
thereby increasing the of those requests. This has a negative
impact especially on the tail latency of applications as shown
in gure 11b. Second, it becomes dicult to identify the exact
individual stage that was the causing this bottleneck. As a
result, the command center will perform non-optimal remedi-
ation where unwanted instances would be scaled up leading
to high resource utilization. This is experimentally validated

Guaranteeing SLAs for Jobs in Microservice Execution Frameworks EuroSys ’19, March 25–28, 2019, Dresden, Germany
0.0
0.5
1.0
Throughput (QPS)
normalized to GrandSLAm
0.0
0.5
1.0
CPU GPU
ED-30
ED-50
ED-DYN
EDF-30
EDF-50
EDF-DYN
GS
Figure 13. Throughput gains from GrandSLAm
in section 6.4.2. Third, equal division dynamic batching intro-
duces a fair share of sub-stage SLA for each stage. This can
restrict microservices from batching aggressively at a single
stage. It can also identify the exact microservice instance
that was responsible for end-to-end SLA violation. Such a
policy, on the one hand, can address the high tail latency
problem that exists in the Earliest Deadline First’s aggressive
and greedy dynamic batching approach. However, on the
other hand, it neglects the fact that the computation time
at each stage is very dierent. Hence, in many scenarios, it
does not exploit the full benets of batching for stages that
have high slack. For example, during the nal stage in WL2
shown in gure 11a and gure 11b, if all the requests have
been batched, the percentage of requests that would have
violated slack would be much lower. However, the equal
division policy cannot exploit this opportunity resulting in
an increased latency of requests.
GrandSLAm.
Our technique, on the other utilizes a hybrid
approach by exploiting the advantages of dynamic batch-
ing as well as enabling sub stage cut o slacks. GrandSLAm
utilizes a weighted sub-stage SLA slack based on the compu-
tational requirements of each stage and an online dynamic
batching technique. As a result, GrandSLAm is able to outper-
form all prior approaches and achieve a much lower average
and tail latency as shown in gures 11a and 11b.
6.4 GrandSLAm Performance
In this section, we evaluate GrandSLAm’s capability in in-
creasing datacenter throughput and server utilization, while
guaranteeing Service Level Agreements (SLAs) for the work-
load scenarios enumerated in Table 4.
6.4.1 Throughput Increase
In this section, we demonstrate the throughput benets of
GrandSLAm, as compared to the state-of-the-art techniques
at scale-out environments. We compare the dierent exe-
cution policies by constructing a real-time simulational ex-
perimental setup consisting of a 1000 node CPU and GPU
enabled cluster. As executing AI applications in accelerator
platforms is becoming more common, we try to evaluate our
technique at both CPU and GPU platforms. For GPU based
experiments the executing workloads do not utilize the CPU
and are executed only in the GPU device and vice versa. Ad-
ditionally, to mimic scale out execution scenarios, we collect
performance telemetry of workload scenarios for multiple
execution runs. We then extrapolate the performance teleme-
try to obtain data nearly equivalent to the amount of data
being collected at large scale datacenter. On top of that, we
build a simulation infrastructure that mimics GrandSLAm’s
execution model at a larger scale. We also x our application
specic SLA, instance count and the server conguration
across experimental runs. We ensure that every request ex-
ecuting across the end-to-end pipeline meets the latency
constraints. Under such situations, we observe the through-
put gains corresponding to each execution policy.
Figure 13 illustrates the throughput gains of GrandSLAm
compared to state of the art execution policies. Each bar
represents the average number of Requests executed per
Second (RPS) across all the applications and workload sce-
narios enumerated in Table 4, normalized to the average QPS
of GrandSLAm. We normalize with respect to GrandSLAm
since the best prior technique is dierent for the CPU and
GPU systems. We clearly see that GrandSLAm outperforms
other execution policies. The graph on the left is the average
throughput for executing the workloads on a CPU cluster
while the graph on the right illustrates the results of the
same experiment on a GPU platform. An interesting obser-
vation consistent across both CPU and accelerator platforms
is that the static batching techniques consistently outper-
form the dynamic batching techniques. This is because, dy-
namic batching, for instance, in the context of time trader,
aggressively batches requests initially. However, requests
get stalled during the terminal stages resulting in decreased
throughput. On the contrary, equal division misjudges the
proportion of slack that is to be allocated. As a result, the
policy restricts aggressive batching during scenarios where
latency does not take a hit. This results in low throughput.
On an average we obtain up to 3
×
performance on the GPU
platform and around 2.2
×
performance on the CPU server
cluster, over the best prior mechanism.
6.4.2 Reduced Overheads
In this section, we illustrate the decrease in the number of mi-
croservice instances when employing GrandSLAm’s execu-
tion policy. Under xed latency and throughput constraints,
we try to obtain the number of microservice instances of each
type that is required for executing the workloads enumerated
in Table 4 in a scale-out fashion similar to section 6.4.1.
Figure 14 compares the instance count for GrandSLAm and
prior works. The top graph corresponds to CPU performance
while the bottom graph corresponds to GPU performance.
We can see that GrandSLAm reduces instance count signif-
icantly on both the CPU and GPU platforms. Additionally,
GrandSLAm’s instance count reduction is higher on the GPU
platform. This is intuitive as GPUs are devices that are opti-
mized to provide high throughput. Overall, we conclude that
GrandSLAm is able to eectively meet SLAs while achieving
high throughput at low instance counts.
EuroSys ’19, March 25–28, 2019, Dresden, Germany RS Kannan et al.
0.0
0.5
1.0
1.5
2.0
2.5
CPU infrastructure
ED-30
ED-50
ED-dynbatch
TT-30
TT-50
TT-dynbatch
GrandSLAm
ASR NLU QA IMC AP FACE HS YCSB SL Mean
0.0
0.5
1.0
1.5
2.0
GPU infrastructure
Number of instances
normalized to GrandSLAm
Figure 14.
Decrease in number of servers due to GrandSLAm
7 Related Work
Prior literature on guaranteeing response latency falls into
two primary categories: Improving QoS without violating
latency constraints and managing SLAs in multi-stage appli-
cations.
7.1 Improving QoS without Latency Violation
Prior work on addressing response latency variation and
providing quality of service (QoS) guarantees have primarily
been in the context of traditional datacenters [
10
,
31
,
35
,
48
].
Bubble-Up [
31
] and Bubble-Flux [
48
] quantify contention for
last level cache and memory bandwidth towards enabling
co-location of a latency critical application alongside batch
applications. However, these techniques prioritize the la-
tency critical user-facing application and end up signicantly
hurting the performance of the co-running batch applica-
tions. Paragon [
10
] and Whare-Map [
30
] utilize runtime
systems using machine learning techniques like collabora-
tive ltering and sensitivity analysis towards identifying the
right amount of resources required for guaranteeing QoS in
heterogeneous datacenters. However, these techniques are
designed for traditional datacenter applications like mem-
cached, web search, etc. There is some prior literature that
attempts to estimate performance at co-located situations
in accelerator environments [
2
,
7
,
8
,
23
,
28
,
43
]. Baymax [
8
]
predicts the behavior of tasks executing in a GPU accelerator
context. Prophet [7] models the interference across acceler-
ator resources in co-located execution scenarios. However,
neither of these techniques caters to the needs of a microser-
vice execution framework, as they do not tackle the challenge
of providing solutions for guaranteeing latency for applica-
tions containing multiple stages.
7.2 Managing SLAs in Multi-Stage Applications
Recent prior studies have identied the advantages of appli-
cations that are composed of multiple stages, especially its
ease of deployment [
12
,
18
,
19
,
22
,
24
,
25
,
38
,
42
,
46
]. Under
such scenarios, support for multi-tenancy as well as schemes
to abstract users from the impact of multi-tenancy would be
critical. However, explorations in this direction by compa-
nies such as Facebook [
26
], Microsoft [
22
,
38
] and academic
institutions neglect multi-tenant execution scenarios [
47
,
49
].
However, the most relevant prior studies that have looked
into multi-stage applications from the academic standpoint
are as follows:
TimeTrader.
[
47
] addresses the problem of meeting appli-
cation specic latency targets for multi request execution in
Online Data Intensive applications (OLDIs). Towards meet-
ing that objective, they employ a mechanism that tries to
reorder requests that contain varying slack using merely an
Earliest Deadline First
scheduling methodology. However,
this technique assumes that the applications contain a single
processing stage and fails to acknowledge the intrinsic la-
tency variance across multiple stages. Hence, it deprioritizes
requests assuming to contain relaxed latency constraints,
however, would be subjected to a bulk of compute at its
later stages. This leads to diminished eectiveness in miti-
gating response latency for multi-stage applications, as we
quantitatively show in Section 6.
PowerChief.
[
49
] seeks to identify the bottleneck stages
present in multi-stage voice and image based intelligent
personal assistant applications towards employing dynamic
voltage frequency scaling to boost partial execution stages.
However, PowerChief does not strive to guarantee SLAs at
a request level. Furthermore, the proposed solution is not
generalized for a microservice execution framework which
handles requests from multiple tenants and focuses on a
particular class of applications.
8 Conclusion
Microservice execution framework is rapidly transforming
the operation of datacenters. It oers signicantly more
transparency into the underlying application execution than
monolithic applications. Such visibility is a key enabler to-
wards co-locating multiple latency critical applications on
the same systems and still meeting SLAs. In the face of such
visibility and changing opportunities, there is a clear need
to rethink runtime systems and frameworks.
Towards this end, we present GrandSLAm, a runtime sys-
tem that exploits this visibility along with identifying slack
in individual queries of dierent applications. GrandSLAm
enables multiple tenants to meet their SLAs, while achiev-
ing high throughput and utilization, with no performance
overhead or programmer support. Therefore, we conclude
that GrandSLAm can be an ecient substrate for current
and future datacenter environments housing microservice
execution frameworks.
Acknowledgment
We thank our anonymous reviewers for their constructive
feedback and suggestions. This work was sponsored by the
National Science Foundation (NSF) under NSF CAREER SHF-
1553485. Jeongseob Ahn was supported by the National Re-
search Foundation of Korea grant (NRF-2017R1C1B5075437)
funded by MSIP, Korea.
Guaranteeing SLAs for Jobs in Microservice Execution Frameworks EuroSys ’19, March 25–28, 2019, Dresden, Germany
References
[1]
Martín Abadi, Paul Barham, Jianmin Chen, Zhifeng Chen, Andy Davis,
Jerey Dean, Matthieu Devin, Sanjay Ghemawat, Georey Irving,
Michael Isard, Manjunath Kudlur, Josh Levenberg, Rajat Monga, Sherry
Moore, Derek G. Murray, Benoit Steiner, Paul Tucker, Vijay Vasudevan,
Pete Warden, Martin Wicke, Yuan Yu, and Xiaoqiang Zheng. 2016.
TensorFlow: A System for Large-Scale Machine Learning. In 12th
USENIX Symposium on Operating Systems Design and Implementation
(OSDI 16).
[2]
Paula Aguilera, Katherine Morrow, and Nam Sung Kim. 2014. Fair
share: Allocation of GPU resources for both performance and fairness.
In Proceedings of the IEEE 32nd International Conference on Computer
Design (ICCD 14).
[3]
Amazon. 2019. What is AWS Lambda? hps://docs.aws.amazon.com/
lambda/latest/dg/welcome.html. (2019).
[4]
Amazon. 2019. What is AWS Step Functions? hp://docs.aws.amazon.
com/step-functions/latest/dg/welcome.html. (2019).
[5]
Microsoft Azure. 2019. Azure Functions Serverless Architecture. hps:
//azure.microso.com/en-us/services/functions/. (2019).
[6]
Luiz André Barroso, Jimmy Clidaras, and Urs Hölzle. 2013. The data-
center as a computer: An introduction to the design of warehouse-scale
machines. Synthesis lectures on computer architecture 8, 3 (2013), 1–154.
[7]
Quan Chen, Hailong Yang, Minyi Guo, Ram Srivatsa Kannan, Jason
Mars, and Lingjia Tang. 2017. Prophet: Precise QoS Prediction on
Non-Preemptive Accelerators to Improve Utilization in Warehouse-
Scale Computers. In Proceedings of the Twenty-Second International
Conference on Architectural Support for Programming Languages and
Operating Systems (ASPLOS 17).
[8]
Quan Chen, Hailong Yang, Jason Mars, and Lingjia Tang. 2016. Bay-
max: QoS Awareness and Increased Utilization for Non-Preemptive
Accelerators in Warehouse Scale Computers. In Proceedings of the
Twenty-First International Conference on Architectural Support for Pro-
gramming Languages and Operating Systems (ASPLOS 16).
[9]
Ronan Collobert, Jason Weston, Léon Bottou, Michael Karlen, Koray
Kavukcuoglu, and Pavel P. Kuksa. 2011. Natural Language Processing
(almost) from Scratch. CoRR abs/1103.0398 (2011). hp://arxiv.org/
abs/1103.0398
[10]
Christina Delimitrou and Christos Kozyrakis. 2013. Paragon: QoS-
aware Scheduling for Heterogeneous Datacenters. In Proceedings of
the Eighteenth International Conference on Architectural Support for
Programming Languages and Operating Systems (ASPLOS 13).
[11]
Tarek Elgamal, Atul Sandur, Klara Nahrstedt, and Gul Agha. 2018.
Costless: Optimizing Cost of Serverless Computing through Function
Fusion and Placement. CoRR abs/1811.09721 (2018). arXiv:1811.09721
hp://arxiv.org/abs/1811.09721
[12]
Sameh Elnikety, Erich Nahum, John Tracey, and Willy Zwaenepoel.
2004. A Method for Transparent Admission Control and Request Sched-
uling in e-Commerce Web Sites. In Proceedings of the 13th International
Conference on World Wide Web (WWW 04).
[13]
A. Gheith, R. Rajamony, P. Bohrer, K. Agarwal, M. Kistler, B. L. White
Eagle, C. A. Hambridge, J. B. Carter, and T. Kaplinger. 2016. IBM
Bluemix Mobile Cloud Services. IBM Journal of Research and Develop-
ment 60, 2-3 (March 2016), 7:1–7:12.
[14]
Google. 2019. Serverless Environment to Build and Connect Cloud
Services. hps://cloud.google.com/functions/. (2019).
[15]
Priya Goyal, Piotr Dollár, Ross Girshick, Pieter Noordhuis, Lukasz
Wesolowski, Aapo Kyrola, Andrew Tulloch, Yangqing Jia, and Kaiming
He. 2017. Accurate, large minibatch SGD: training imagenet in 1 hour.
arXiv preprint arXiv:1706.02677 (2017).
[16]
Johann Hauswald, Yiping Kang, Michael A. Laurenzano, Quan Chen,
Cheng Li, Ronald Dreslinski, Trevor Mudge, Jason Mars, and Lingjia
Tang. 2015. Djinn and Tonic: DNN as a Service and Its Implications for
Future Warehouse Scale Computers. In Proceedings of the 42nd Annual
International Symposium on Computer Architecture (ISCA 15).
[17]
Johann Hauswald, Michael A. Laurenzano, Yunqi Zhang, Cheng Li,
Austin Rovinski, Arjun Khurana, Ron Dreslinski, Trevor Mudge, Vini-
cius Petrucci, Lingjia Tang, and Jason Mars. 2015. Sirius: An Open
End-to-End Voice and Vision Personal Assistant and Its Implications
for Future Warehouse Scale Computers. In Proceedings of the Twenti-
eth International Conference on Architectural Support for Programming
Languages and Operating Systems (ASPLOS 15).
[18]
Yuxiong He, Sameh Elnikety, James Larus, and Chenyu Yan. 2012. Zeta:
Scheduling Interactive Services with Partial Execution. In Proceedings
of the Third ACM Symposium on Cloud Computing (SoCC 12).
[19]
Scott Hendrickson, Stephen Sturdevant, Tyler Harter, Venkateshwaran
Venkataramani, Andrea C. Arpaci-Dusseau, and Remzi H. Arpaci-
Dusseau. 2016. Serverless Computation with OpenLambda. In 8th
USENIX Workshop on Hot Topics in Cloud Computing (HotCloud 16).
[20]
IBM. 2019. IBM Cloud Functions. hps://www.ibm.com/cloud/
functions. (2019).
[21]
Muhammad Hussain Iqbal and Tariq Rahim Soomro. 2015. Big data
analysis: Apache storm perspective. International journal of computer
trends and technology 19, 1 (2015), 9–14.
[22]
Virajith Jalaparti, Peter Bodik, Srikanth Kandula, Ishai Menache,
Mikhail Rybalkin, and Chenyu Yan. 2013. Speeding Up Distributed
Request-response Workows. In Proceedings of the ACM SIGCOMM
2013 Conference on SIGCOMM.
[23]
Adwait Jog, Evgeny Bolotin, Zvika Guz, Mike Parker, Stephen W.
Keckler, Mahmut T. Kandemir, and Chita R. Das. 2014. Application-
aware Memory System for Fair and Ecient Execution of Concurrent
GPGPU Applications. In Proceedings of Workshop on General Purpose
Processing Using GPUs (GPGPU 14).
[24]
Evangelia Kalyvianaki, Marco Fiscato, Theodoros Salonidis, and Peter
Pietzuch. 2016. THEMIS: Fairness in Federated Stream Processing
Under Overload. In Proceedings of the 2016 International Conference on
Management of Data (SIGMOD 16).
[25]
Svilen Kanev, Juan Pablo Darago, Kim Hazelwood, Parthasarathy Ran-
ganathan, Tipp Moseley, Gu-Yeon Wei, and David Brooks. 2015. Pro-
ling a Warehouse-scale Computer. In Proceedings of the 42nd Annual
International Symposium on Computer Architecture (ISCA 15).
[26]
S. Kanev, K. Hazelwood, G. Y. Wei, and D. Brooks. 2014. Tradeos
between power management and tail latency in warehouse-scale appli-
cations. In IEEE International Symposium on Workload Characterization
(IISWC 14).
[27]
R. S. Kannan, A. Jain, M. A. Laurenzano, L. Tang, and J. Mars. 2018.
Proctor: Detecting and Investigating Interference in Shared Datacen-
ters. In 2018 IEEE International Symposium on Performance Analysis of
Systems and Software (ISPASS 18).
[28]
O. Kayiran, N. C. Nachiappan, A. Jog, R. Ausavarungnirun, M. T. Kan-
demir, G. H. Loh, O. Mutlu, and C. R. Das. 2014. Managing GPU
Concurrency in Heterogeneous Architectures. In 2014 47th Annual
IEEE/ACM International Symposium on Microarchitecture (MICRO 14).
[29]
Kris Kobylinski. 2015. Agile Software Development for Bluemix with
IBM DevOps Services. In Procee dings of the 25th Annual International
Conference on Computer Science and Software Engineering (CASCON
15).
[30]
Jason Mars and Lingjia Tang. 2013. Whare-map: Heterogeneity in
"Homogeneous" Warehouse-scale Computers. In Proceedings of the
40th Annual International Symposium on Computer Architecture (ISCA
13).
[31]
Jason Mars, Lingjia Tang, Robert Hundt, Kevin Skadron, and Mary Lou
Soa. 2011. Bubble-Up: Increasing Utilization in Modern Warehouse
Scale Computers via Sensible Co-locations. In Proceedings of the 44th
Annual IEEE/ACM International Symposium on Microarchitecture (MI-
CRO 11).
[32]
Sean Marston, Zhi Li, Subhajyoti Bandyopadhyay, Juheng Zhang, and
Anand Ghalsasi. 2011. Cloud Computing - The Business Perspective.
Decis. Support Syst. 51, 1 (April 2011), 14.
EuroSys ’19, March 25–28, 2019, Dresden, Germany RS Kannan et al.
[33]
David Meisner and Thomas F. Wenisch. 2012. DreamWeaver: Ar-
chitectural Support for Deep Sleep. In Proceedings of the Seventeenth
International Conference on Architectural Support for Programming
Languages and Operating Systems (ASPLOS 12).
[34]
V. Nagarajan, R. Hariharan, V. Srinivasan, R. S. Kannan, P. Thinakaran,
V. Sankaran, B. Vasudevan, R. Mukundrajan, N. C. Nachiappan, A. Srid-
haran, K. P. Saravanan, V. Adhinarayanan, and V. V. Sankaranarayanan.
2012. SCOC IP Cores for Custom Built Supercomputing Nodes. In IEEE
Computer Society Annual Symposium on VLSI (ISVLSI 12).
[35]
V. Nagarajan, K. Lakshminarasimhan, A. Sridhar, P. Thinakaran, R.
Hariharan, V. Srinivasan, R. S. Kannan, and A. Sridharan. 2013. Per-
formance and energy ecient cache system design: Simultaneous
execution of multiple applications on heterogeneous cores. In IEEE
Computer Society Annual Symposium on VLSI (ISVLSI 13).
[36]
V. Nagarajan, V. Srinivasan, R. Kannan, P. Thinakaran, R. Hariharan,
B. Vasudevan, N. C. Nachiappan, K. P. Saravanan, A. Sridharan, V.
Sankaran, V. Adhinarayanan, V. S. Vignesh, and R. Mukundrajan. 2012.
Compilation Accelerator on Silicon. In IEEE Computer Society Annual
Symposium on VLSI (ISVLSI 12).
[37]
Daniel Povey, Arnab Ghoshal, Gilles Boulianne, Lukas Burget, Ondrej
Glembek, Nagendra Goel, Mirko Hannemann, Petr Motlicek, Yanmin
Qian, Petr Schwarz, et al
.
2011. The Kaldi speech recognition toolkit. In
IEEE 2011 workshop on automatic speech recognition and understanding.
[38]
Andrew Putnam, Adrian M. Cauleld, Eric S. Chung, Derek Chiou,
Kypros Constantinides, John Demme, Hadi Esmaeilzadeh, Jeremy Fow-
ers, Gopi Prashanth Gopal, Jan Gray, Michael Haselman, Scott Hauck,
Stephen Heil, Amir Hormati, Joo-Young Kim, Sitaram Lanka, James
Larus, Eric Peterson, Simon Pope, Aaron Smith, Jason Thong, Phillip Yi
Xiao, and Doug Burger. 2014. A Recongurable Fabric for Accelerat-
ing Large-scale Datacenter Services. In Proceeding of the 41st Annual
International Symposium on Computer Architecuture (ISCA 14).
[39]
Amazon Web Services. 2017. The Image Recognition and
Processing Backend reference architecture demonstrates how to
use AWS Step Functions to orchestrate a serverless process-
ing workow using AWS Lambda, Amazon S3, Amazon Dy-
namoDB and Amazon Rekognition. hps://github.com/aws-samples/
lambda-refarch-imagerecognition. (2017).
[40]
Samuel L Smith, Pieter-Jan Kindermans, and Quoc V Le. 2017. Don’t
Decay the Learning Rate, Increase the Batch Size. arXiv preprint
arXiv:1711.00489 (2017).
[41]
Lavanya Subramanian, Vivek Seshadri, Arnab Ghosh, Samira Khan,
and Onur Mutlu. 2015. The Application Slowdown Model: Quantifying
and Controlling the Impact of Inter-application Interference at Shared
Caches and Main Memory. In Proceedings of the 48th International
Symposium on Microarchitecture (MICRO 15).
[42]
Lalith Suresh, Peter Bodik, Ishai Menache, Marco Canini, and Florin
Ciucu. 2017. Distributed Resource Management Across Process Bound-
aries. In Proceedings of the 2017 Symposium on Cloud Computing (SoCC
17).
[43]
Shanjiang Tang, BingSheng He, Shuhao Zhang, and Zhaojie Niu. 2016.
Elastic Multi-resource Fairness: Balancing Fairness and Eciency in
Coupled CPU-GPU Architectures. In Proceedings of the International
Conference for High Performance Computing, Networking, Storage and
Analysis (SC 16).
[44]
Prashanth Thinakaran, Jashwant Raj Gunasekaran, Bikash Sharma,
Mahmut Taylan Kandemir, and Chita R Das. 2017. Phoenix: a
constraint-aware scheduler for heterogeneous datacenters. In IEEE
37th International Conference on Distributed Computing Systems (ICDCS
17).
[45]
Prashanth Thinakaran, Jashwant Raj, Bikash Sharma, Mahmut T Kan-
demir, and Chita R Das. 2018. The Curious Case of Container Orches-
tration and Scheduling in GPU-based Datacenters. In Proceedings of
the ACM Symposium on Cloud Computing (SoCC 18).
[46]
T. Ueda, T. Nakaike, and M. Ohara. 2016. Workload characterization
for microservices. In IEEE International Symposium on Workload Char-
acterization (IISWC 16).
[47]
Balajee Vamanan, Hamza Bin Sohail, Jahangir Hasan, and T. N. Vi-
jaykumar. 2015. TimeTrader: Exploiting Latency Tail to Save Datacen-
ter Energy for Online Search. In Proceedings of the 48th International
Symposium on Microarchitecture (MICRO 15).
[48]
Hailong Yang, Alex Breslow, Jason Mars, and Lingjia Tang. 2013.
Bubble-ux: Precise Online QoS Management for Increased Utiliza-
tion in Warehouse Scale Computers. In Proceedings of the 40th Annual
International Symposium on Computer Architecture (ISCA 13).
[49]
Hailong Yang, Quan Chen, Moeiz Riaz, Zhongzhi Luan, Lingjia Tang,
and Jason Mars. 2017. PowerChief: Intelligent Power Allocation for
Multi-Stage Applications to Improve Responsiveness on Power Con-
strained CMP. In Proceedings of the 44th Annual International Sympo-
sium on Computer Architecture (ISCA 17).
[50]
Matei Zaharia, Reynold S. Xin, Patrick Wendell, Tathagata Das,
Michael Armbrust, Ankur Dave, Xiangrui Meng, Josh Rosen, Shiv-
aram Venkataraman, Michael J. Franklin, Ali Ghodsi, Joseph Gonzalez,
Scott Shenker, and Ion Stoica. 2016. Apache Spark: A Unied Engine
for Big Data Processing. Commun. ACM 59, 11 (Oct. 2016), 10.
[51]
Yilei Zhang, Zibin Zheng, and M.R. Lyu. 2011. Exploring Latent Fea-
tures for Memory-Based QoS Prediction in Cloud Computing. In IEEE
Symposium on Reliable Distributed Systems (SRDS 11).
